Cable for MF-100 Marine Finder (depth sounder)
Manufacturer
Fuso Industries Ltd
Date1960s
Object number00036032
NameCable
MediumMetal, plastic
DimensionsOverall: 480 mm, 0.02 kg
ClassificationsTools and equipment
Credit LineANMM Collection Gift from Malcolm Goldfinch
DescriptionThis cable was used with an MF-100 Marine Finder (or depth sounder), manufactured by Fuso Industries in the late 1960s. The MF-100 sounder was marketed to leisure boaters, who wouldn’t need the determine depth capabilities over 160 metres.HistoryTo 'sound’ is the maritime operation of ascertaining the depth of the sea in the vicinity of a ship or boat. Depth and the consistency of the sea bottom have been recorded on maritime charts since the development of marine navigation; and this information was one of the few consistencies that early navigators could rely upon. It indicated nearness to land and other hazards, suitability of anchorage areas and could even be used in navigating along a section of coast during fog, heavy weather or at night.
Until the invention of mechanical depth sounders, the main method of finding the depth of water (up to about 30 meters) was the use of the ‘lead and line’ consisting of a 2-3 kilogram metal lead and line. A lead’s hand situated in the bow of the vessel would swing the lead into the water while the vessel was underway, and count off the depth of the water by observing a series of knots and coloured flags placed at intervals on the line. The lead’s hand would then report back to the captain the depth and nature of the water. To determine the nature of the seafloor, the lead could be covered in tallow onto which sand or mud would adhere. Once the lead was retrieved, the material could be interpreted and recommendations could be made for anchoring.
In the latter half of the 19th century, the sounding machine was invented by British physicist William Thomas and later Baron Kelvin. The sounding machine consisted of a drum wire mounted on a framework secured to the ship’s deck. A lead sinker weighted the line, which was then dropped over the side of the vessel through a fairlead. The lead sends the line to the bottom and the depth is read off on a scale on the sounding machine. For a more accurate depth a ‘sounding tube’ was attached to the wire, which consisted of a glass tube closed and one end and open to the water at the other. The inside was coated in a chemical, which changed colour when it came into contact with seawater. Through the principles of ‘Boyle’s Law’ the air inside the tube would compress as the tube went deeper into the water. As the air compresses the chemical would react to the seawater marking the depth the tube had obtained.
Electronic depth sounders have many different names, and have been called everything from ‘echo-sounder’ and ‘depth-sounders’ to ‘fish-finders’, ‘wreck-finders’ and ‘depth-finders’. First developed after the end of World War I when the Anglo-French ‘asdic’ was introduced as means of locating the positions of submerged submarines, it was subsequently adapted for use in marine surveys for recording soundings without the labour of ‘slinging the lead’.
These electronic instruments are based on the principle of sonar or sound wave. They use a vertical sonar pulse set at a specific frequency and known speed which is set out from a transducer mounted in the hull of the boat or ship. The pulse passes through the seawater, strikes the ocean floor, and then rebounds back to the transducer. As the speed of the pulse is known the sounder can calculate the depth of water.
The average echo sounder consists of a transmission and reception unit that sends sound signals through the water, receives and decodes information and converts that information into either a graphic or visual form. Attached to the received is a transducer that acts as a microphone and a speaker under the water. The receiver unit measures the time taken for one pulse of sound to travel to the bottom or an intermediate object and return to the sounder. From this measurement the echo sounder produced graphic or digital information that represents the depth of water and the position of mid-water objects relative to the bottom.
Frequency has a very significant effect on the transmission of reception of sound under water and is a major factor influencing the choice of sounder purchased. Low frequency has the capability of obtaining greater depth and bottom discrimination – as in a Sub-bottom profiler. High frequency gives very good discrimination between small objects close together and is less effected by turbulence.
A typical high frequency sounder such as the Fuso MF 100 is set at 200 kHz. This is way beyond the range of human hearing as is the commonly used low frequency of 50 kHz. Most of the leisure market sounders sold are 200 kHz as most leisure boaters do not go to remote offshore locations regularly, and will not need depth capabilities over 160 metres.
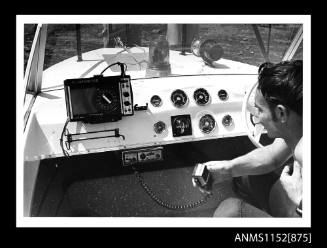
SignificanceEasy to operate and read, the Fuso MF-100 was a mid-range marine finder specifically developed for the common fishing and boating community. When it was designed in the late 1960s, it incorporated all the developments in marine finders until it was superseded by the paperless Visual Display Digital Echo Sounders. Although produced in their thousands, few of these marine finders have survived due to their low resale value.





1960-1989
Graeme Andrews OAM MA
1960-1980



Parent (child)/Child (parent)